Projekt ALAN, zkráceně Advanced upper-Limb Autonomous Neuro-rehabilitation, řeší vývoj pomůcky pro rehabilitaci horních končetin po mozkových příhodách. Protože vývoj lékařských i zdravotnických přístrojů vyžaduje stejně jako mnoho dalších oborů vysokou spolehlivost, ověřenou testováním, zaměřila se první fáze projektu na samotný robotický tester pro ověření funkčnosti přístroje i vývoj programového vybavení. Cílový produkt, roboticky podporovaná rehabilitační pomůcka, již nyní slibuje průlom v konvenčních metodách terapie.

O co jde?
Lékaři nám jistě odpustí možnou nepřesnost, ale z pohledu elektroniky stačí říci, že mozkové příhody či mrtvice obecně téměř vždy vyústí v dlouhodobou poruchu hybnosti a chronické postižení nervového systému. Ve Velké Británii, kde je projekt ALAN doma, má 85% postižených mrtvicí následné potíže s hybností horních končetin. Znovuzískávání motorických dovedností je v případě klasické terapie zdlouhavé a nákladné. Kritickým faktorem je také nedostatek školených zdravotníků a pracovišť, kde je rehabilitace možná. Robotická rehabilitace umožní postiženým každý den trénovat déle, bez asistence personálu a to pravděpodobně i v domácím prostředí. V konečném důsledku to zlepší a urychlí uzdravování a ušetří náklady. Uvádění lékařských zařízení na trh s sebou nese potřebu dlouhodobých testů, klinických studií a náročný schvalovací proces. Robotický tester by měl výrazně urychlit zkoušení spolehlivosti.
Několik subsystémů najednou
Tým Univerzity v Leedsu v rámci projektu řeší několik subsystémů:
- Rehabilitační přístroj myPAM s perspektivou komerční výroby
- Robotickou paži Alan-Arm pro testování přístroje
- Softwarové řešení pro testy (simulace cvičení a vyhodnocování procesu)
- Software pro dálkovou spolupráci terapeuta a pacienta (nastavování úloh, zpracování velkých objemů dat a bezpečnost)
Protože už od začátku bylo jasné, že systém má být přenositelný do komerčního prostředí s možností trvalého vývoje a zvyšování preciznosti, není překvapivé, že byla zvolena platforma myRIO a Compact RIO National Instruments spolu s prostředím LabView. Hardwarová platforma umožňuje změnu počtu a typu vstupů a výstupů podle výsledků vývoje při zachování kompatibility software. LabView zase poskytlo nástroje pro modulární programování i evaluaci procesů cvičení i robotického testeru ve stejném prostředí. V LabView byly naprogramovány všechny složky řízení obou přístrojů. Pro emulaci pohybu lidské paže se jako velmi výhodné ukázaly 3D grafy a modul SoftMotion, které umožňují zobrazovat v podstatě skutečnou polohu a pohyb paže v matematickém modelu. Výsledné řízení je šestiosé.
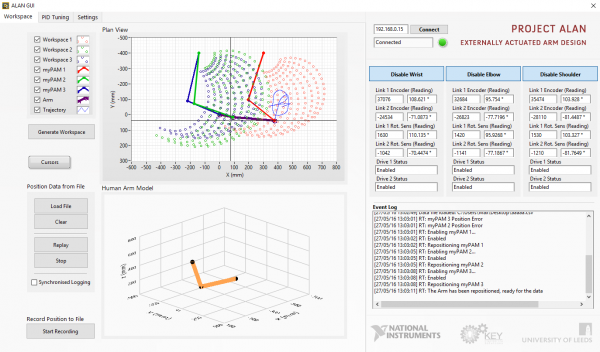
Uživatelské rozhraní testovací paže v LabView poskytuje kompletní přehled všech důležitých parametrů. Studenti kromě jiného vstoupili do komunity vývojářů, používajících LabView, takže mohli vytěžit již existující techniky sběru dat, řízení v reálném čase i kódování a zabezpečení dat. První fázi vývoje testeru a rehabilitačního přístroje tak tým dvanácti studentů zvládl za 9 měsíců.
Žádná cesta není slepá
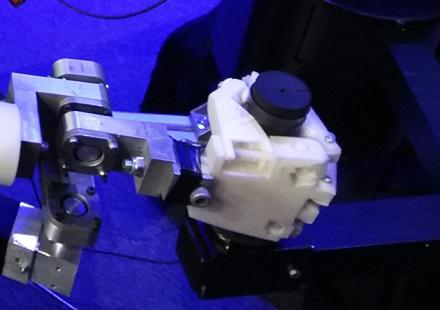
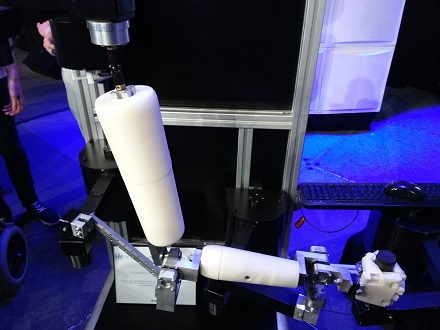
Při vývoji přístrojů tým zvládl řadu překážek. Postupně se měnily počty a typy senzorů a aktuátorů, takže bylo nutné měnit řídící elektroniku. V projektu byly použity například jednotky NI myRIO-1900, NI cRIO-9022, NI cRIO-9122, 9215 a 9505. Oříškem se stal vývoj robotické paže. První prototyp využil dokumentaci open source humanoida InMoov. 3D tisk přinesl precizně zpracované díly a vizuálně dokonalou robotickou paži s ovládacími prvky, umístěnými uvnitř. Pro testovaný přístroj měla ovšem nedostatečnou hybnost v požadovaných osách, volnost pohybu a rychlost. Druhý model paže s překvapivě jednoduchou konvenční konstrukcí z profilů a běžných strojních kloubů přinesl výrazně lepší mechanické vlastnosti, blížící se skutečné lidské paži. Pohonné jednotky jsou v tomto případě rozmístěny tak, aby co nejlépe simulovaly přirozený pohyb zápěstí, lokte i ramene. Animace srovnává oba prototypy.
Za projekt získali studenti a pedagogové univerzity v Leedsu již několik ocenění. Kromě toho, že komerční využití projektu je již ve fázi přípravy, připravuje se další výzkum využití robotických paží.


Jak bylo zmíněno, studenti při svém projektu využili pomoc komunity programátorů, kteří využívají LabView. Svůj pomyslný dluh jim beze zbytku splatili, protože svůj kód pro řízení robotické paže InMoov v komunitě zveřejnili a vývojářům vědcům i fandům tak poskytli cenné zkušenosti s řízením pohybu pro robotické paže z 3D tiskáren.
Přímo k věci
Na rozdíl od jiných studentských projektů se tým z univerzity v Leedsu soustředil na jádro problému. Studenti se nezdržovali vývojem komerčně dostupných čidel, aktuátorů a řídících jednotek. To jim přineslo také přístup k vývojové a testovací platformě LabView s dostatečným vybavením pro vývoj testeru i budoucí vývoj samotné aplikace. Připomínáme, že výsledek zvládli za devět měsíců.
Příběh tohoto studentského projektu dobře dokumentují také fotky na Twitteru https://twitter.com/roboticrehab
www.robotic.rehab
https://decibel.ni.com/content/docs/DOC-46580



