
V nadcházející soutěži, která bude probíhat od 18. do 27. února ve státě Washington (USA), budou odborníci z CTU-CRAS se svými roboty zdolávat vícepodlažní terén, což s sebou přináší úskalí při přechodu mezi podlažími po velmi strmých a úzkých schodech, možným ale velmi obtížným průletem vertikální šachet, nebo nové objekty k detekci, a to včetně lokace zdroje úniku nebezpečného CO2.
Tým CTU-CRAS vědců a studentů z katedry kybernetiky a z katedry počítačů Fakulty elektrotechnické ČVUT v Praze vyvíjí multirobotický systém pro operace v předem neznámém prostředí, například v oblasti postižené katastrofou. Díky soutěži Defense Advanced Research Projects Agency (DARPA) lze otestovat systémy autonomních spolupracujících robotů, které bez lidské asistence dokáží prozkoumat podzemní prostory v podmínkách věrně napodobujících reálnou akci.

K účasti v dalším kole soutěže DARPA se vyjádřil doc. Tomáš Svoboda, vedoucí týmu CTU-CRAS, zároveň i vedoucí katedry kybernetiky na FEL ČVUT: „Účast v dalším kole je pro nás výzvou především z pohledu nového typu terénu. Na autonomním řízení robotů při přejezdu překážek, např. schodů, dlouhodobě pracujeme. Pro lepší 3D mapy prostředí jsme zintenzivnili spolupráci s robotickou laboratoří NORLAB z University Laval v Quebecu. Kolegové z Kanady s námi spolupracovali i dříve, ale tentokrát se k nám připojí i osobně přímo v místě soutěže.“
V konkurenci týmů nejlepších světových pracovišť včetně MIT, ETH, JPL, UCB, CalTech, KAIST, GeorgiaTech, OregonState, UPenn nebo CMU budou vědci z FEL ČVUT také bojovat o zajímavé finanční odměny. Vítěz si odveze 500 000 $, druhé místo je honorováno 250 000 $ a třetí pak 100 000 $.

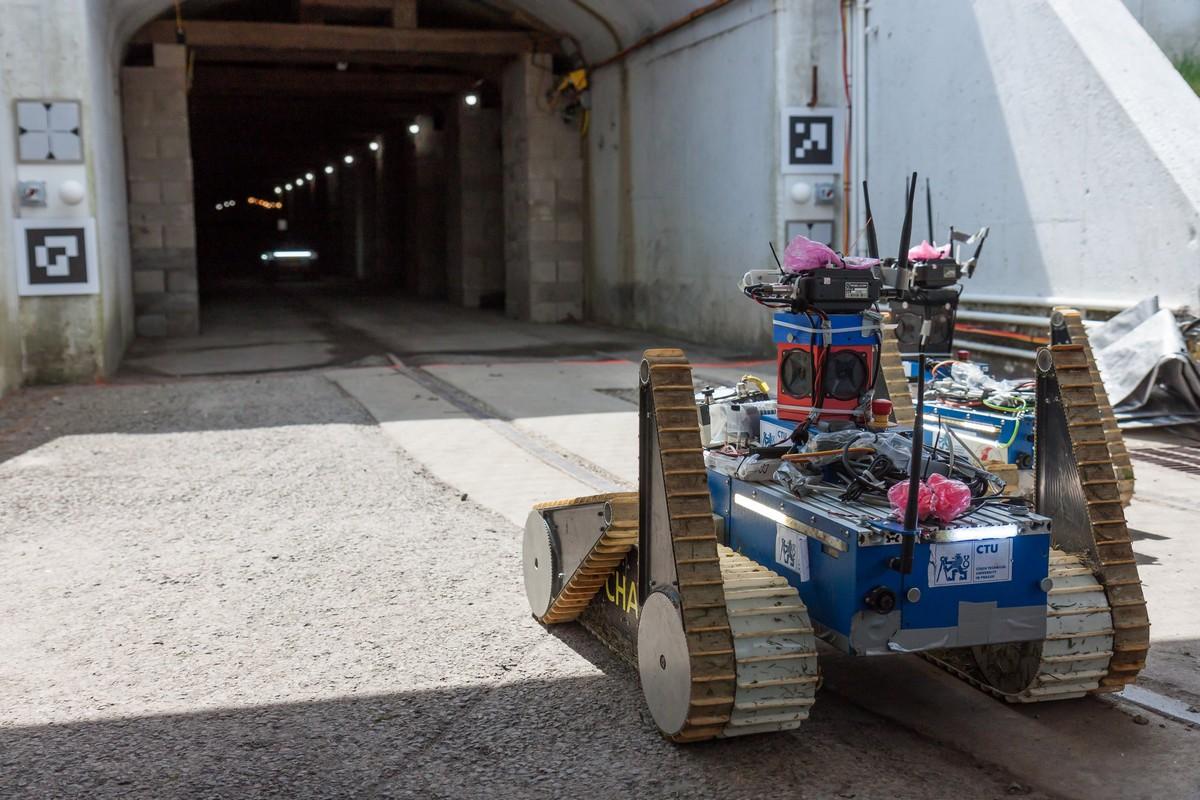
V soutěži budou nasazeny jak pozemní, tak i létající roboty různých typů i velikostí. Roboty jsou vybaveny pokročilou senzorickou technikou zahrnující všesměrové kamery, stereo-kamery, nebo lidary. Cílem je vyvinout systém pro efektivní spolupráci robotů s různými schopnostmi. Roboty budou mapovat neznámé prostředí a hledat objekty, to vše v prostředí bez GPS a jen s velmi omezenou vzájemnou komunikací. Žádoucí je co největší míra autonomie, veškeré potřebné výpočty proto probíhají přímo na robotech.
V srpnu loňského roku dokázal tým CTU-CRAS z Fakulty elektrotechnické ČVUT v Praze (FEL) zvítězit mezi nesponzorovanými týmy v soutěži DARPA Subterranean Challenge Tunnel Circuit a obsadil celkově 3. místo.
Více informací o účasti CTU-CRAS na soutěži DARPA je k dispozici na webu týmu.



